

近日,《Journal of Ocean Engineering and Science》以“CSUB: Design and modeling of an autonomous screw‑driven amphibious vehicle”为题发表了我校海洋学院徐鹏飞教授团队在水陆两栖无人装备领域取得的重要研究进展,详细介绍了基于“Coastal, Surface, Underwater & Benthic”(岸海潜底)多栖作业理念研发的螺旋驱动水陆两栖无人平台“CSUB-1”(图1),系统展示了该水陆两栖无人平台的设计、仿真及性能评估结果。
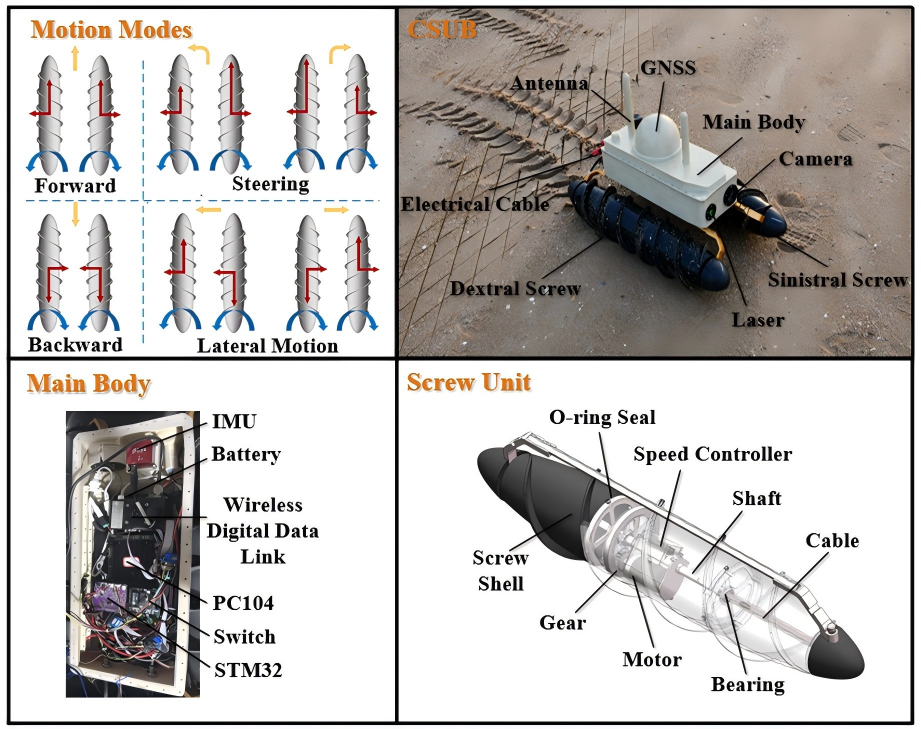
图1 螺旋驱动水陆两栖无人平台样机
水陆两栖装备在滨水复杂环境下具备通过性优势,广泛应用于环境监测、科学调查等领域。当前的两栖无人平台普遍采用轮式、履带式、仿生腿、球形机构等多样化结构设计,为在水中与陆地之间实现切换而采用的变形机构或运动单元导致结构繁复、可靠性下降。螺旋推进方式具有水陆一体化驱动特点,展现出独特潜力,不仅能作为水中推进器,还能在雪地、冰面、泥沙、沼泽上提供有效牵引力。尽管已有螺旋驱动载具的应用实例,但螺旋驱动普遍存在操纵性差的技术难题,水陆运动的作用机理不明晰,缺乏多工况系统建模与理论分析,制约了其自主控制与跨界质自适应能力的进一步发展。
为深入揭示其中的科学问题,团队开展了一系列水动力数值模拟,探究了螺旋设计参数对螺旋推进性能的影响,提出了螺旋体在水中推进的力学模型。在此基础上,创新性地提出了一种带桨叶的螺旋体结构,进一步大幅提升了水下螺旋驱动效能。
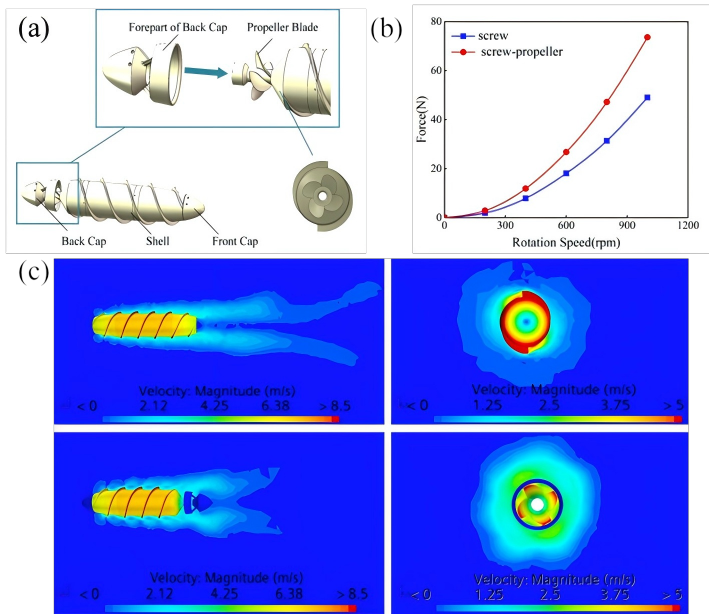
图2 带桨叶的螺旋体结构水动力数值仿真
在陆地环境下,螺旋推进面临与非结构化地形之间复杂的接触作用关系,其运动机理受地面介质特性显著影响,建模与控制难度远高于水中推进。团队采用离散元方法与多体动力学技术耦合机制,建立了具备力学特性的离散介质地面。仿真结果展示了螺旋推进车在泥沙介质地面的推进轨迹(图3),该方法未来可成为陆地推进性能评估和预测的重要手段。
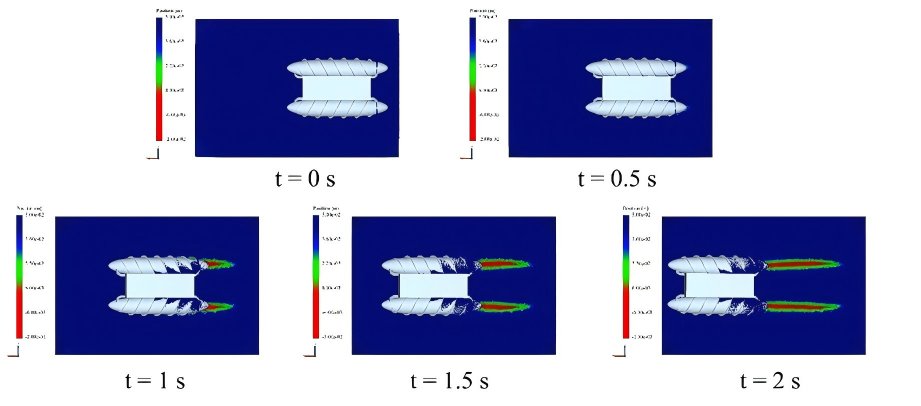
图3 螺旋车陆地推进的DEM-MBD耦合仿真结果
为验证系统设计的实用性,团队进行了系统性的实地测试,验证场景覆盖多种典型地形,包括沙地、碎石路面、草地、爬坡、越障等,展现了良好的地面通过性。此后,团队在连云港市大沙湾海域完成了自主离岸与登陆试验(图4),测试了该平台的水陆转换能力,充分体现了其环境适应性。
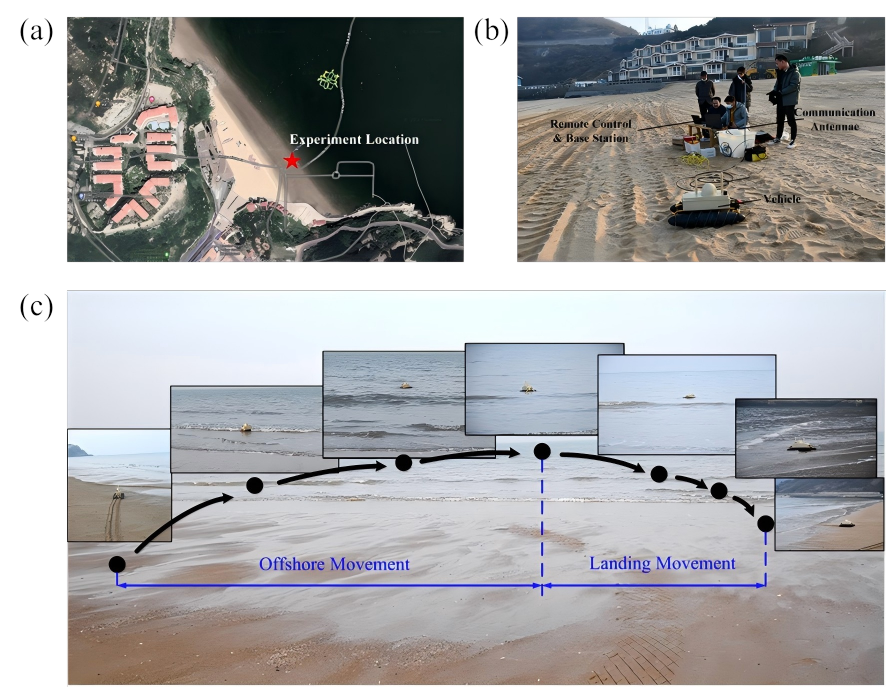
图4 CSUB在潮滩近海环境下的水陆转换试验
该水陆两栖装备已获国际专利1项(一种多栖运动机器人及其越障方法,GB2611404),有望成为深海探测、极地科考、水下作业等前沿应用的核心装备,具有重要的应用前景。
河海大学港口海岸与近海工程学院博士研究生开艳同学为论文第一作者,海洋学院徐鹏飞教授为通讯作者,论文其他合作者包括河海大学海洋学院博士生林海龙、港口海岸与近海工程学院硕士生孙承锐,上海交通大学赵敏研究员,深圳市博铭维技术股份有限公司杜光乾。相关研究工作得到了国家自然科学基金、国家重点研发计划以及江苏省海洋科技创新项目的资助。
论文信息:Yan Kai, Pengfei Xu*, Hailong Lin, Chengrui Sun, Min Zhao, Guangqian Du, 2025. CSUB: Design and modeling of an autonomous screw-driven amphibious vehicle. Journal of Ocean Engineering and Science. doi: 10.1016/j.joes.2025.07.003.
原文链接:
https://www.sciencedirect.com/science/article/pii/S2468013325000476










 地址:江苏省南京市西康路1号
地址:江苏省南京市西康路1号 邮编:210024
邮编:210024
